샤프트모터 특징
심플한 구조
1. 자석과 코일 만의 심플한 구조
2. 마찰이 발생하지 않기 때문에 유지보수가 필요없고particle 도 없다.
3. 효율이 높고, 짧은 코일 길이에 큰 추력을 얻을 수 있다.
높은 정밀도
1. 마찰이 없기 때문에 열팽창에 의한 오차가 없다.
2. 갭 변동에 따른 추력의 영향을 주지 않는다.
3. 강한 자력을 띠기 때문에 코어(철심)을 사용하지 않고 스텐레스로 Cogging이 발생하지 않고, 정밀한 동작이 가능하다.
4. 자석과 코일부는 비접촉으로 구동하기 때문에 구조적으로Backlash가 발생하지 않는다.
간단한 조립 가능
1. 코일과 샤프트 사이에 흡착력이 없다.
2. 코일에 공급되는 자기장은 360 모든 방향에서 공급되는 구조로 에어갭(0.5~1.75mm)이 공차 역할을 하기때문에 정밀 조립이 필요없다.
3. 종래의 볼 스크류와 유사한 구조로 기구부 설계변경시 슬림, 소형 장비의 구현이 가능하다.
4. 샤프트 형상이므로 설계하기 쉽고, 조립하기 쉽다.
|
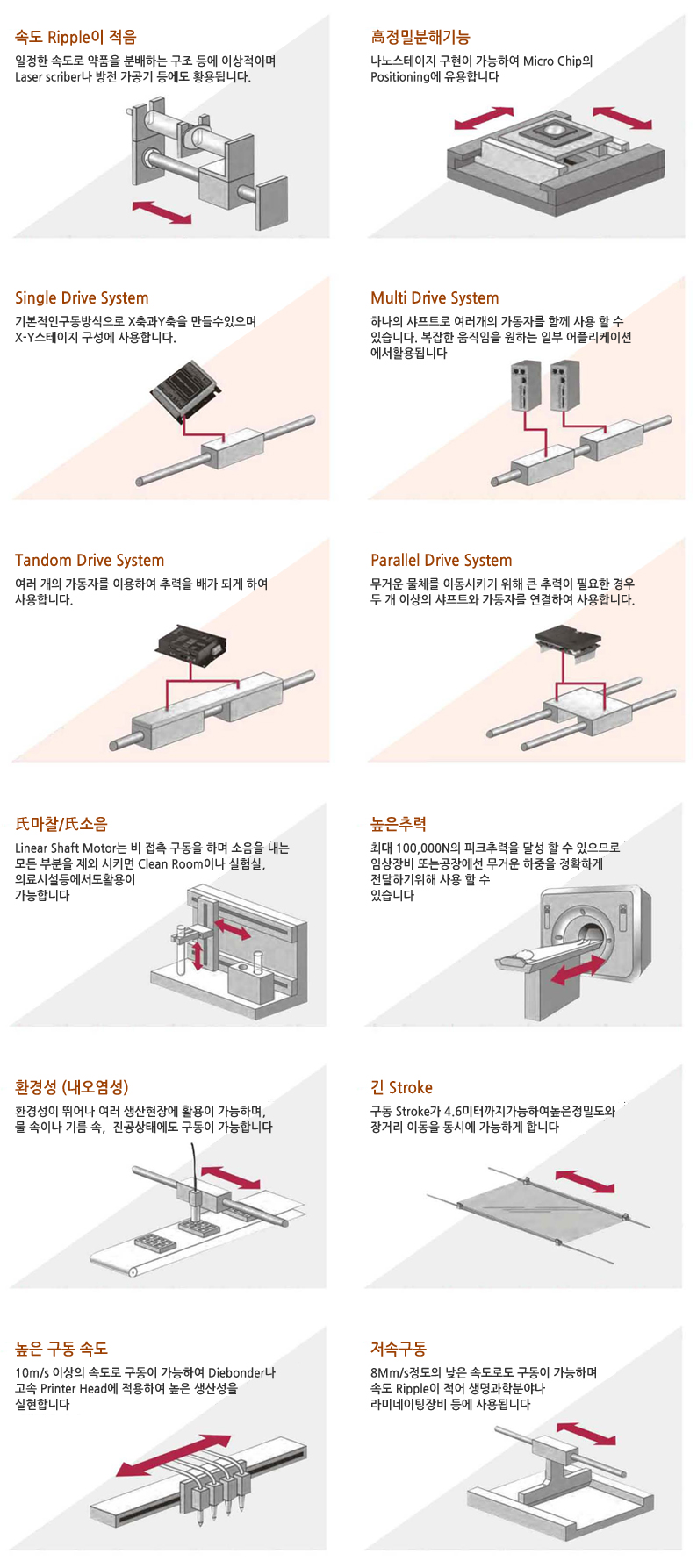
다채로운 구동 방식
1. 병렬, 직렬, 멀티 등의 다양한 구동 방식에 대응
2. 1개의 AMP 로 2축 동기 구동
3. 1개의 샤프트에 다축 구동
샤프트모터 성능과 적응범위
1. 최대 추력 6,000 N (병렬 구동 24,000 N) (N은 힘의 단위 ‘뉴턴’을 나타냄)
2. 최대 스트로크 3m
3. 최고 속도 6.3m/sec
4. 최저 속도 8μm/sec
5. 최대 가속도 20G (1G = 9.8m/s_)
6. 속도 리플 0.05 %
※ 상기 데이터는 시스템 구성 사용 환경에 따라 달라질 수 있습니다.
[제품 구성]
샤프트모터 (GHC)
단축로보트 (GHC)
리니어스케일 (GSI / RENISHAW)
리니어서보드라이버 (PANASONIC / MITSUBISH)
* 세부 사항은 카탈로그 참조 바랍니다.
|
|
|